破解柔性生产难题:知识驱动具身智能工业机器人的实战应用指南

在工业4.0迈向工业5.0的进程中,传统的“固定编程”机器人已无法满足多品种、小批量、高柔性的生产需求。随着人工智能与大模型技术的爆发,具身智能(Embodied Intelligence) 成为解锁工业机器人潜力的关键。然而,如何在复杂多变的工业场景中让机器人拥有“常识”和“专业知识”?本文将深度解析前沿的知识驱动具身智能工业机器人(EIIR)技术框架,探讨其如何成为下一代智能制造的核心技术范式。

一、技术演进:为什么工业机器人需要“知识驱动”?
传统的工业机器人依赖于“示教-再现”模式,虽然精度高,但缺乏适应性。当工件位置偏移、型号变更或环境光线变化时,系统往往需要停机重调 。
为了解决这一问题,学界与产业界开始探索具身智能。具身智能强调智能体不仅要有算法“大脑”,更要有能感知和行动的“身体”,通过与物理环境的交互获取数据、学习技能 。
知识驱动的核心理念:
要让机器人在工业场景中高效、准确、安全地工作,必须赋予其三类知识 :
通用知识: 对物理世界的基础认知(如重力、碰撞)。
作业环境知识: 实时感知车间布局、设备位置、动态障碍(语义地图)。
操作对象知识: 了解工艺流程、工件属性和装配关系(知识图谱)。
富唯智能提出的知识驱动具身智能工业机器人技术框架,正是为了解决这三类知识的获取、表征与应用问题,实现了从“自动化设备”到“智能化工人”的跨越。
二、深度解析:知识驱动具身智能工业机器人(EIIR)五大核心模块
根据清华大学深圳国际研究生院团队(项目页面: Github[ citation:1])及富唯智能的商业化实践,一个完整的EIIR框架包含以下五大模块:
1. 世界模型:构建工业语义地图
机器人需要理解“车间语义”。例如,“精密仪器区需降速通行”或“料箱位于上料位”。富唯智能通过融合2D/3D视觉与多模态感知,构建包含环境信息和语义规则的动态语义地图 。
2. 大脑:基于GRID大模型的任务规划
这是整个框架的核心。传统大模型在工业应用中容易出现“幻觉”,输出不符合物理规律的指令。富唯智能全球独创的GRID(任务规划大模型) 专门针对工业场景优化,通过融合知识图谱(包含工艺流程)和语义地图(包含环境信息),使得模型输出的指令不仅准确,而且与实际物理环境紧密结合 。数据显示,其在工业任务准确率上比通用大模型高出83% 。
3. 小脑:语言-技能的多层控制模型
“大脑”下达指令(如“抓取A工件放到B夹具”)后,“小脑”负责分解为原子技能(移动到A、视觉定位、调整角度、抓取、移动、放置)。富唯智能自研的小脑模型通过一体化控制器实现了“手、脚、眼、脑”的协同,保证了工业要求的精度(如振动系数小于0.53C)和稳定性 。
4. 虚实融合仿真器
利用数字孪生技术,在实际部署前进行百万次仿真训练,降低现场调试时间,真正实现复合机器人的“15分钟快速部署” 。
三、技术纵深:知识图谱+大模型,如何避免“工业幻觉”
在2025年召开的IEEE/ASME国际先进智能机电系统会议上,北京理工大学的研究指出,在人机协作中,仅靠大模型存在领域知识鸿沟,必须通过知识图谱进行增强 。
富唯智能的GRID大模型正是采用了这一路径:
数据层: 输入生产线、仓库物料等工业场景信息。
知识层: 调用构建好的行业知识图谱,包含标准的工艺流程(如“拧螺丝”的扭矩参数、“装配”的先后顺序)。
推理层: 大模型结合上述信息进行推理,输出符合工业规范的指令。
结语:
知识驱动的具身智能工业机器人技术框架,正通过“大脑”的认知推理与“小脑”的精准执行,重塑我们对制造业的想象。正如清华大学团队所言,EIIR技术正在塑造下一代工业机器人,并为智能制造提供全新的技术范式 。对于追求柔性、效率和智能化转型的企业来说,拥抱这一框架,意味着抢占未来智造的制高点。
审核编辑 黄宇
相关文章
-
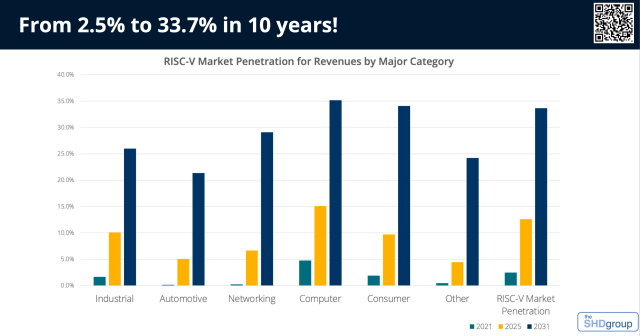
RISC-V进军三大核心赛道:数据中心、边缘AI、太空
-
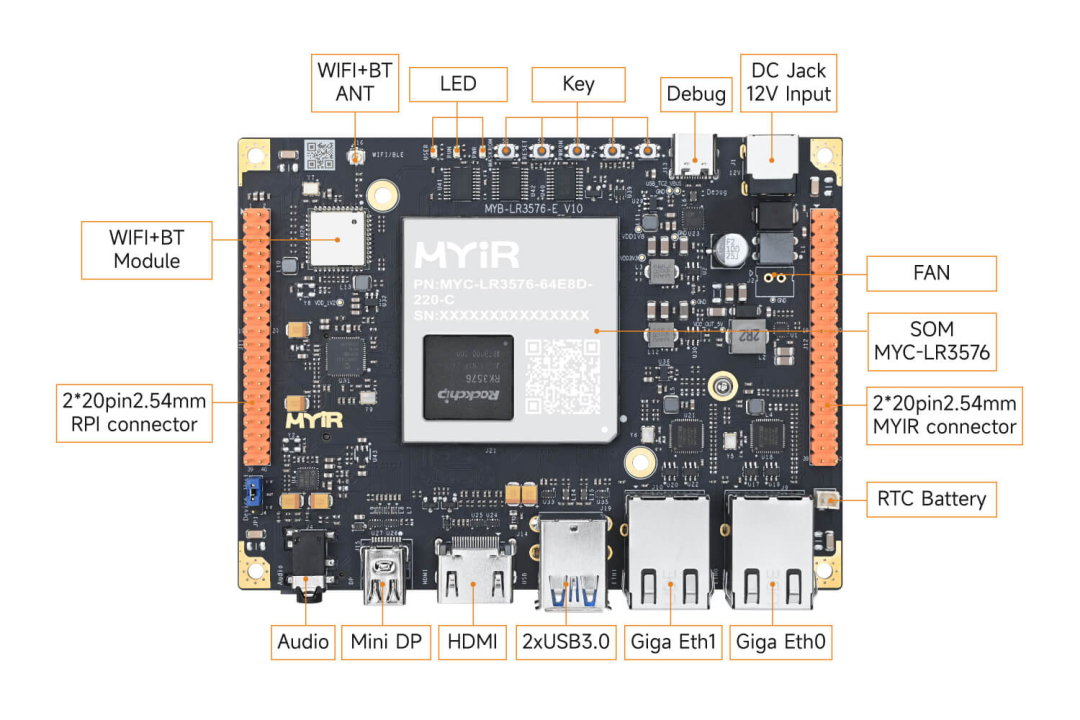
AI落地好场景,用米尔RK3576做无人视力测试仪
-

2.3cm间距里的定位魔法:4天线如何实现360°智能跟随定位
-

简仪科技十周年庆暨2026 JY CONNECT圆满举行
-
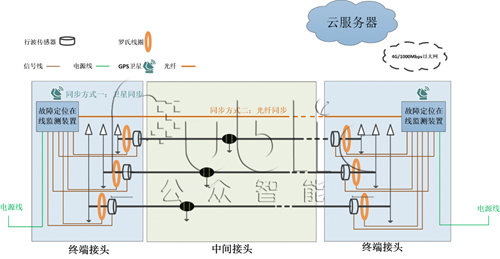
电缆故障监测采用的技术内容重点涉及哪些方面?
-

普乐特空压机远程启停控制方案:用物联网技术让空压机管理”智”
-

分布式光伏监控系统解决方案:从并网合规到智能运维的技术闭环
-

创新突破|光纤可插拔式1470nm光源:重塑精准激光除草新范式


