2026 人形机器人产业化关键战,虹科全栈方案破解核心痛点

据艾瑞咨询《2025 商用具身智能白皮书》数据显示,2025 年全球具身智能市场规模已达192 亿元人民币,未来五年复合增长率预计高达73%,十年内将形成万亿级市场体量。在国家 “十五五” 规划重点布局与地方政策密集扶持下,国内具身智能产业加速突围,头部企业已实现十亿元级营收突破,人形机器人正从技术验证阶段迈入规模化量产的关键窗口期。
当前,人形机器人产业化进程仍受限于感知、决策、执行全链路的技术瓶颈,核心部件可靠性、场景适配性、测试验证效率等问题成为制约落地的关键。
虹科基于供应链核心资源整合,构建覆盖“感知 - 思考 - 行动”的具身智能全栈测试解决方案,针对性破解行业核心痛点,为产业化落地提供技术支撑。
感知层:
高可靠时空感知体系,破解 “环境交互精度不足” 难题
行业痛点
三维感知在复杂场景下鲁棒性不足,实时三维重建精度难以满足工业级需求;
户外作业时空定位依赖外场测试,存在成本高、周期长、场景覆盖不全等问题,制约 “感知 - 决策” 闭环形成。
解决方案预告
深度视觉赋能:依托友思特 Stereolabs ZED 双目相机(GMSL/USB 双接口形态),解析主流深度成像技术原理,攻克动态场景三维重建、复杂光照适应性等核心难题,搭配开源工具链实现软硬件协同开发,已在工业自动化、移动机器人等场景形成成熟落地案例。

ZED X双目相机
应用示例
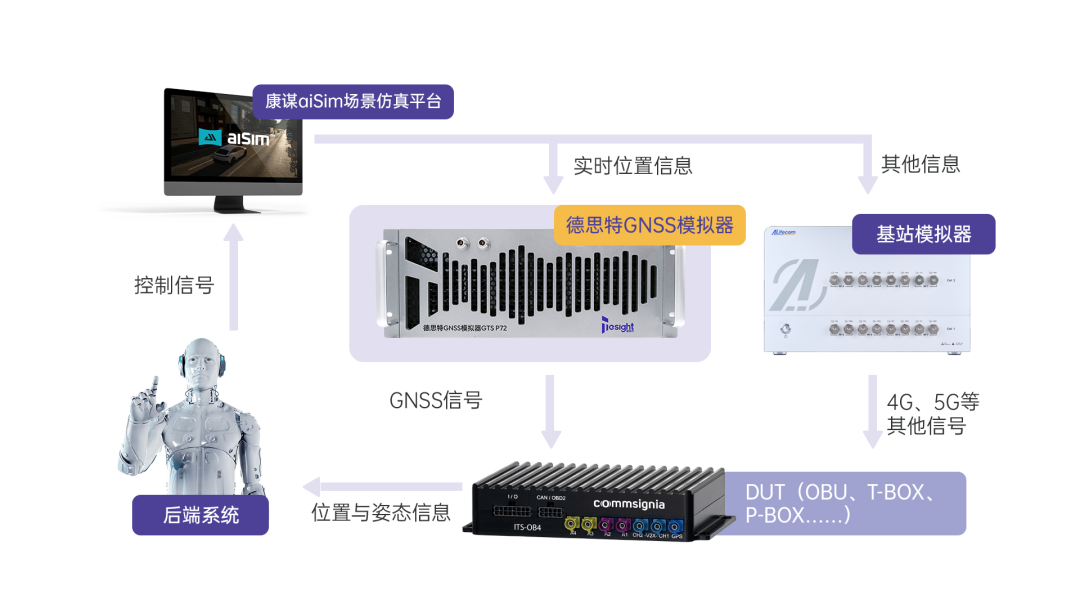
定位仿真验证:为满足具身智能户外作业对高可靠时空感知的迫切需求,本方案以德思特GNSS模拟器为核心,建硬件在环(HIL)测试环境,将户外全域作业场景的定位验证转移至实验室,通过在实验室高保真复现多场景、多路径的全球卫星导航信号,实现对机器人定位模块的精准注入与闭环验证,完成对机器人高可靠时空感知的精准测试,为具身智能户外作业的定位稳定性提供全场景覆盖支撑。
思考层:
实时智能协同架构,突破 “决策执行效率瓶颈”
行业痛点
多轴精密运动控制依赖专用控制卡,导致系统成本高、扩展性差;
机器人内部通信存在延迟与兼容性问题,关节线缆束缚影响机械设计灵活性;
Sim2Real 迁移不稳定,虚拟仿真与物理世界存在适配鸿沟。
解决方案预告
实时通信与控制赋能:CAN FD凭借其高传输速率、大载荷容量、高可靠性及低布线成本优势,适用于人形机器人灵巧手的毫米级运动控制、毫牛级力控反馈等对实时性与精度要求极高的任务。基于CAN FD技术,虹科提供的多路CAN FD总线工作站、虹科PCAN-Explorer 6定制化软件平台为机器人领域中高速指令下发、多传感器数据回传及全链路测试提供高效技术支持与一体化解决方案。
虹科灵巧手控制系统
数字孪生验证:搭建机器人运动控制数字孪生平台,实现虚拟环境下的无限次测试迭代,优化运动控制算法参数,缩小 Sim2Real 迁移差距,提升技术落地效率。
行动层:
高精度执行控制方案,补齐 “物理交互能力短板”
行业痛点
执行器集成度低、力控精度不足,难以满足仿生手、灵巧手的精细操作需求;
动作控制响应滞后,稳定性与动态适配性无法匹配复杂工业场景,制约人机协同与物理世界交互质量。
解决方案预告
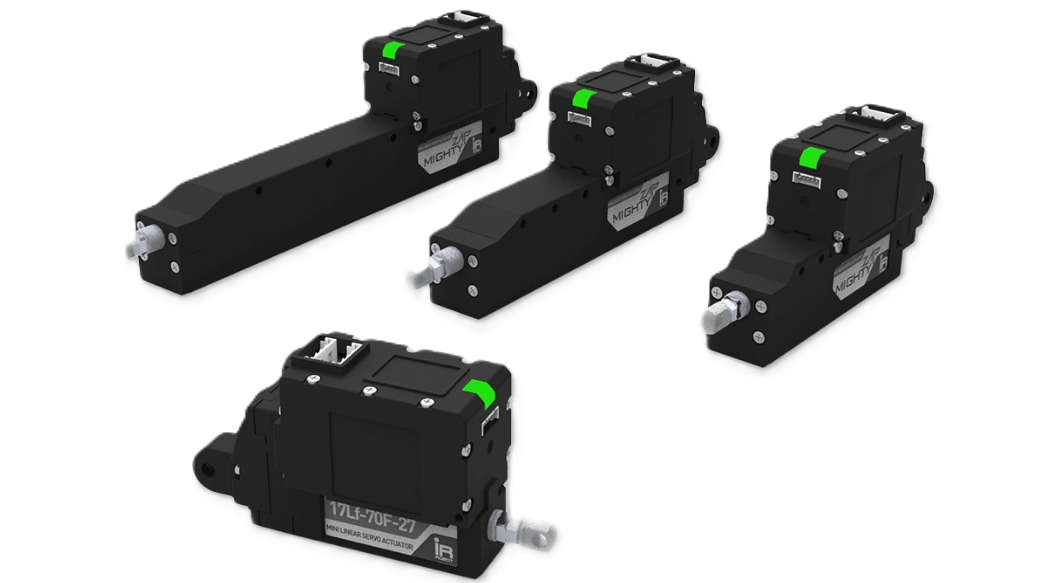
精密执行器部署:采用宏集 IR Robot 小型线性伺服执行器,凭借高集成度、高精度特性,实现仿生手、灵巧手的精准抓取力控与复杂动作复刻,完美适配人机协同场景下的精细操作需求。
模块化控制支撑:搭配Berghof 模块化控制器,基于CODESYS 软件开发平台,构建高效的本地控制架构,实现传感器信息实时处理与运动控制算法快速执行,保障动作响应的稳定性与迅捷性,充当机器人 “动作控制小脑”。

相关文章
-
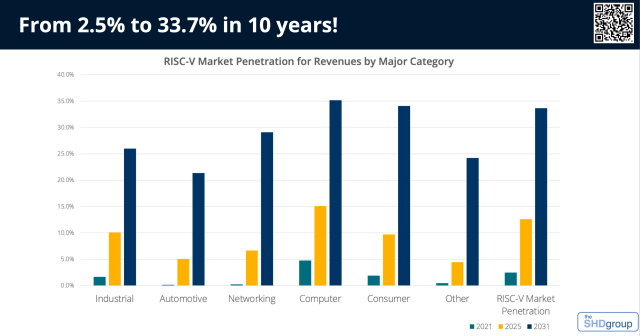
RISC-V进军三大核心赛道:数据中心、边缘AI、太空
-
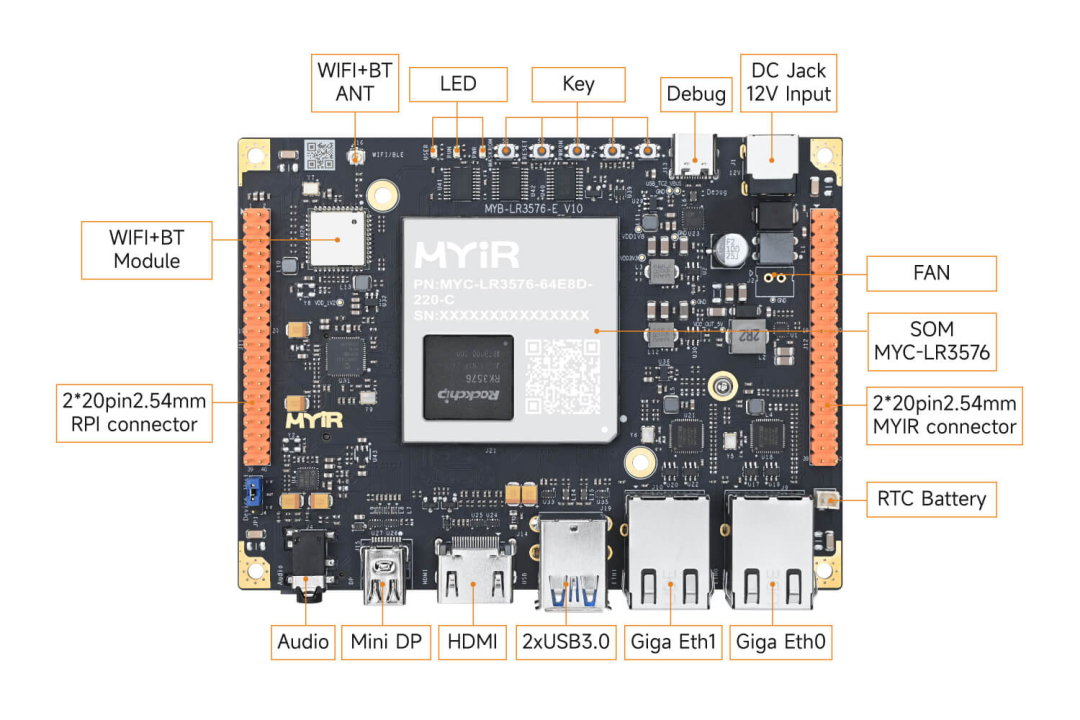
AI落地好场景,用米尔RK3576做无人视力测试仪
-

2.3cm间距里的定位魔法:4天线如何实现360°智能跟随定位
-

简仪科技十周年庆暨2026 JY CONNECT圆满举行
-
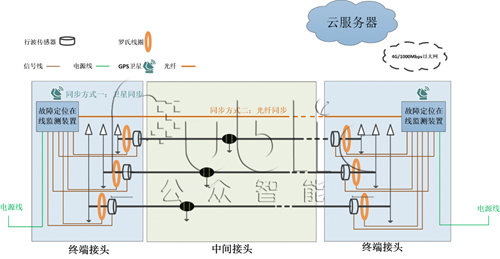
电缆故障监测采用的技术内容重点涉及哪些方面?
-

普乐特空压机远程启停控制方案:用物联网技术让空压机管理”智”
-

分布式光伏监控系统解决方案:从并网合规到智能运维的技术闭环
-

创新突破|光纤可插拔式1470nm光源:重塑精准激光除草新范式


