AI落地好场景,用米尔RK3576做无人视力测试仪

随着人工智能技术的快速发展,视觉检测技术在医疗健康领域的应用越来越广泛。传统的视力检测需要专业医护人员操作,检测效率较低,且难以实现自动化。本项目基于米尔RK3576开发板,设计并实现了一套智能视力检测系统,旨在提供一种便捷、高效的视力检测方案。RK3576是一款高性能ARM架构的开发板,搭载瑞芯微处理器,具备强大的AI推理能力,适合运行手势识别、图像处理等AI任务。
01
项目目标
- 实现自动视力检测:用户通过简单的手势即可完成左右眼的视力检测
- AI手势识别:利用MediaPipe实现精准的OK手势检测,作为启动测试的交互方式
- 智能化流程控制:自动识别E字方向、判断测试结果、自动切换测试眼别
- 语音交互:集成语音播报功能,提供清晰的测试指引和结果反馈
02
系统功能设计
2.1 功能架构系统架构图说明:
架构说明:
- RK3576开发板: 核心控制器,运行所有业务逻辑
- 视频播放模块: 使用GStreamer进行硬件解码播放引导视频
- 手势识别模块: MediaPipe Hands检测OK手势作为启动信号
- 距离检测模块: 串口读取TOF传感器数据,检测用户距离
- 语音播报模块: ES8388音频编解码,播报欢迎词和检测结果
- UI显示模块: PySide6 Qt开发,HDMI输出到显示屏
数据流向:
- 摄像头采集图像 → MediaPipe手势识别 → 判断OK手势
- TOF传感器检测距离 → 串口通信 → 判断距离是否合适
- 随机生成E字方向 → 显示在屏幕上
- 用户手势 → 摄像头采集 → 手势识别 → 对比判断
- 测试结果 → 语音播报 + 屏幕显示
2.2 核心功能模块
模块 |
功能描述 |
视频播放模块 |
开机播放引导视频,支持GStreamer硬件解码 |
手势识别模块 |
使用MediaPipe检测OK手势,作为测试启动信号 |
距离检测模块 |
通过串口读取红外测距传感器数据,检测用户距离 |
视力测试模块 |
随机显示E字方向,根据用户手势判断是否正确 |
语音播报模块 |
播放欢迎语音、测试指引、视力结果等 |
UI显示模块 |
使用PySide6显示视频、E字图片、状态信息 |
2.3 测试流程
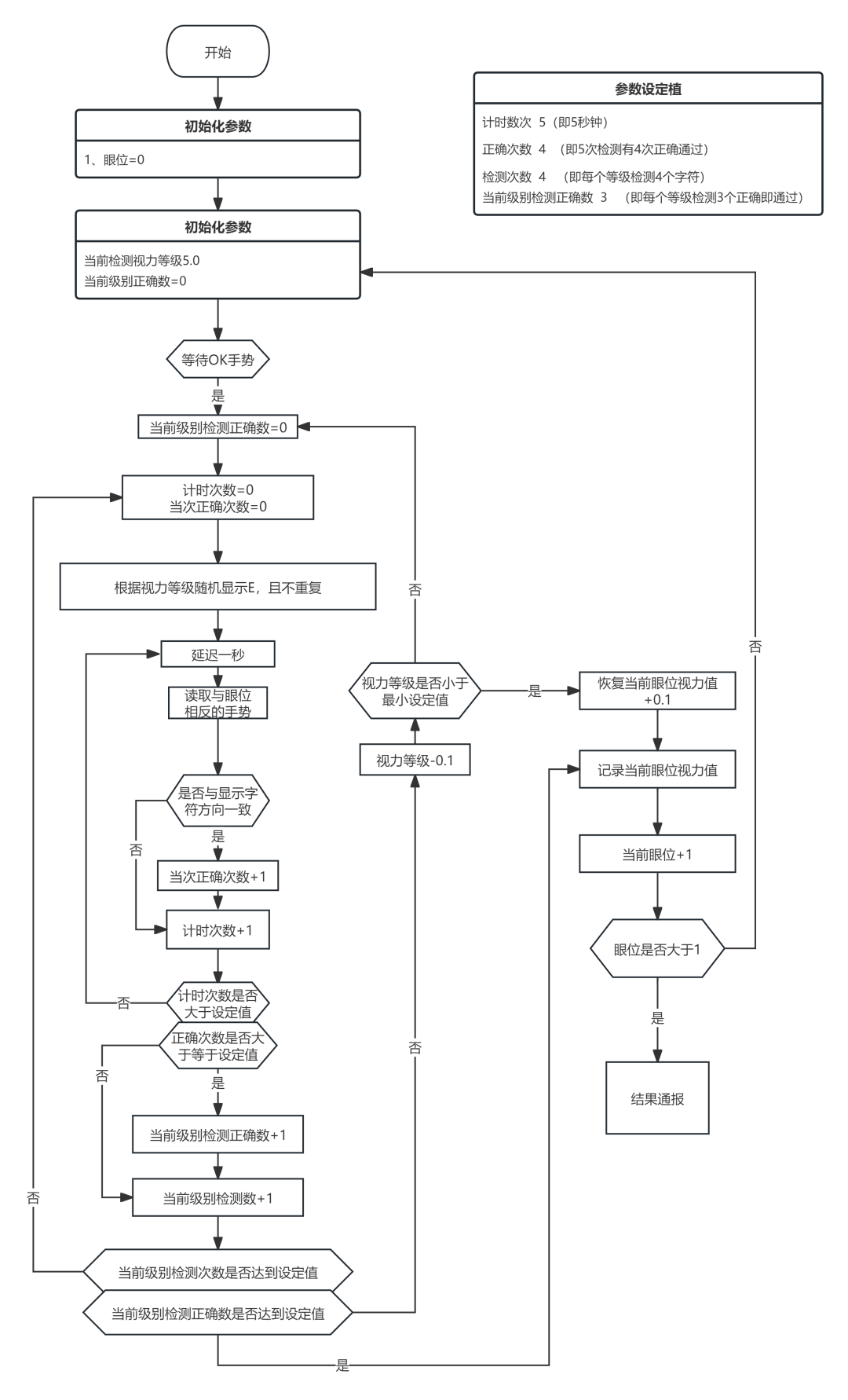
流程说明:
- 系统初始化 -启动摄像头、手势识别、距离传感器、音频系统
- 播放引导视频 -开机自动播放intro_guide.mp4介绍使用方法
- 等待OK手势 -视频结束后显示提示,用户做OK手势启动测试
- 右眼测试 -随机显示E字方向,用户用手势回答,3次测试后判断结果
- 左眼测试 -自动切换到左手,重复右眼测试流程
- 显示结果 -播报双侧视力结果,显示在屏幕上
- 等待重新测试 -用户可再次做OK手势重新开始测试
03
硬件与电路说明
3.1 硬件清单
设备 |
型号/规格 |
用途 |
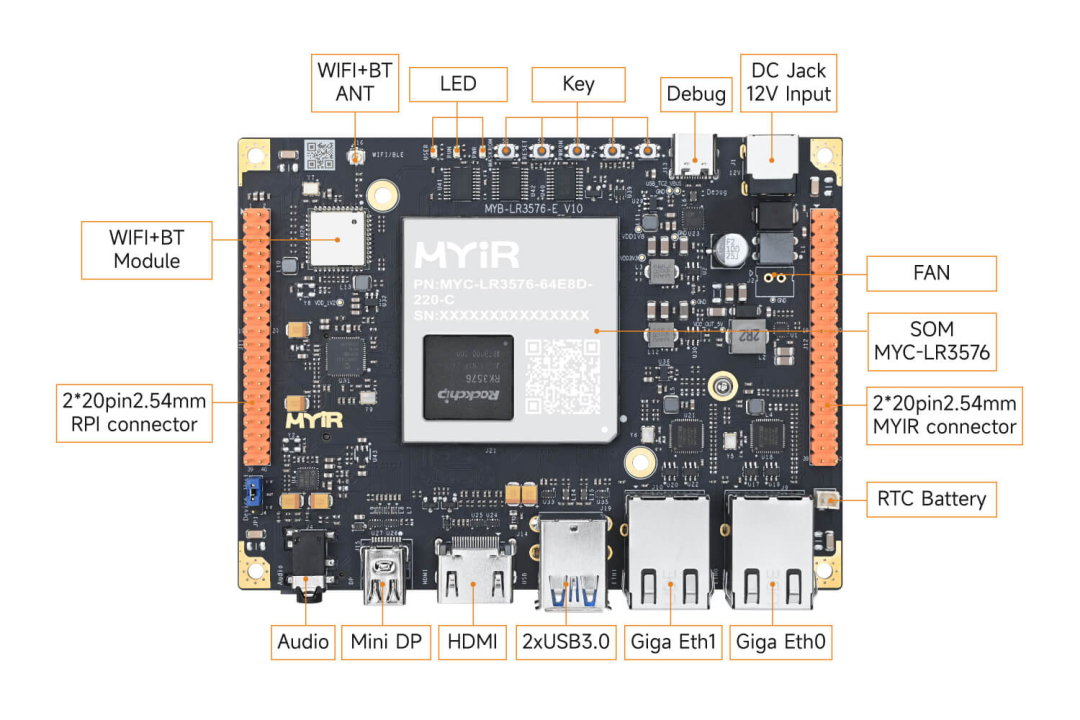
开发板 |
米尔RK3576 |
核心控制器,运行AI推理和业务逻辑 |
摄像头 |
Intel RealSense D435 |
采集RGB图像用于手势识别 |
距离传感器 |
TOF激光测距模块 |
检测用户与设备的距离(2cm10m) |
音频编解码 |
ES8388 |
音频输出(通过ALSA驱动) |
显示器 |
HDMI显示屏 |
显示UI和视力表 |
Intel RealSense D435 深度摄像头特点本项目选用Intel RealSense D435深度摄像头作为视觉采集设备,用于手势图像采集。相比普通USB摄像头具有以下优势:
- 双流输出
- 同时支持RGB彩色流和深度流
- 本项目使用RGB流(640x480)进行手势识别
- 深度流可用于未来扩展(如手势分割)
- 高质量图像
- RGB分辨率:1920x1080 @ 30fps
- 采集分辨率:640x480 @ 15fps(用于手势识别)
- 内置自动白平衡、自动曝光功能
- 适用于各种光照条件
- 即插即用
- 通过USB 3.0接口连接
- 提供跨平台的librealsense SDK (pyrealsense2)
- 支持Linux、Windows等操作系统
- 稳定性强
- 工业级品质,稳定性好
- 自动曝光和对焦,适应能力强
- 在复杂环境下仍能准确识别手势
- 易于集成
- Python绑定支持,易于开发
- 帧同步机制,确保数据一致性
- 实时性好,满足手势识别需求
TOF激光测距模块特点本项目选用TOF(Time of Flight)激光测距模块作为距离检测设备,具有以下优势:
- 超宽测距范围
- 测距范围:2cm ~ 10m
- 覆盖从近到远的各种使用场景
- 高精度测量
- 测量精度:±1cm
- 分辨率高,可检测微小距离变化
- 快速响应
- 响应时间:<100ms
- 实时检测用户距离,适用于动态场景
- 抗干扰能力强
- 不受光照变化影响
- 不受被测物体颜色和材质影响
- 低功耗
- 功耗低,发热小
- 适合长时间运行
3.2 硬件接线
RK3576开发板│├── USB3.0接口 ────>Intel RealSense D435 深度摄像头│ │├── 串口(UART) ─────>TOF激光测距模块│ │├── I2S/PCM ────────>音频编解码 (ES8388) ──>喇叭│ │└── HDMI ──────────>显示器 (HDMIOUT)
3.3 系统环境
- 操作系统: Buildroot Linux (ARM64)
- Python版本: 3.10+
- AI框架: MediaPipe (Google)
- 视觉库: Intel RealSense SDK (librealsense)
- GUI框架: PySide6
- 多媒体: GStreamer + ALSA
- 音频格式: WAV (44.1kHz, 16bit, stereo)
04
关键技术说明
4.1 AI手势识别使用Google的MediaPipe框架进行手势识别,主要特点:
- 模型: MediaPipe Hands (预训练模型)
- 输入: RGB图像 (640x480)
- 输出: 21个关键点坐标、手势分类
- 性能: 实时推理 (30fps)
4.1.1 MediaPipe Hands 21个关键点MediaPipe Hands 模型输出21个手部关键点,编号从0到20:
8 12 16 20│ │ │ │▼ ▼ ▼ ▼○───────────○───────────○───────────○ ← 食指、中指、无名指、小指│ │ │ │7 11 15 19│ │ │ │○───────────○───────────○───────────○│ │ │ │6 10 14 18│ │ │ │○───────────○───────────○───────────○│ │ │ │5 9 13 17│ │○───────────────────────○│ │4 13│ │○────┴───────────────────────┴────○│ │0 9│ │└────────────────────────────────┘(手腕)
关键点索引说明:
- 0: 手腕
- 1-4: 拇指 (掌骨→近节指骨→远节指骨→指尖)
- 5-8: 食指
- 9-12: 中指
- 13-16: 无名指
- 17-20: 小指
4.1.2 手势识别核心代码
# 手势识别关键代码 (hand_gesture_task.py)import mediapipeasmpimport numpyasnpimport cv2# 初始化MediaPipe Handsmp_hands=mp.solutions.handshands=mp_hands.Hands( static_image_mode=False, # 视频流模式 max_num_hands=2, # 最多检测2只手 min_detection_confidence=0.7, # 检测置信度阈值 min_tracking_confidence=0.5# 跟踪置信度阈值)def calculate_distance(p1, p2): """计算两个landmark之间的欧氏距离(归一化坐标)""" return((p1.x-p2.x)**2+(p1.y-p2.y)**2)**0.5def recognize_gesture(landmarks): """ 识别特殊手势:OK、NO(拳头) 返回: "OK", "NO", 或 None """ # 获取关键点 thumb_tip=landmarks[4] # 拇指尖 index_tip=landmarks[8] # 食指尖 middle_tip=landmarks[12] # 中指尖 ring_tip=landmarks[16] # 无名指尖 pinky_tip=landmarks[20] # 小指尖 wrist=landmarks[0] # 手腕 #===OK手势检测=== # 条件:拇指和食指接近,其他手指伸开 thumb_index_dist=calculate_distance(thumb_tip, index_tip) if thumb_index_dist< 0.05: # 检查中指是否伸开 if calculate_distance(middle_tip, wrist) >0.3: return"OK" #===NO/拳头检测=== # 条件:所有指尖靠近手掌 tips=[index_tip, middle_tip, ring_tip, pinky_tip] all_close=True fortipintips: if calculate_distance(tip, wrist)>0.15: all_close=False break if all_close: return"NO" returnNonedef get_finger_direction(landmarks, h, w): """ 获取食指指向的方向 返回: "上", "下", "左", "右", "静止" """ # 食指近端关节(5)和指尖(8) x5, y5=int(landmarks[5].x*w),int(landmarks[5].y*h) x8, y8=int(landmarks[8].x*w),int(landmarks[8].y*h) dx=x8-x5 dy=y8-y5 threshold=25# 阈值,像素单位 # 判断是否静止 ifabs(dx)< threshold and abs(dy) < threshold: return "静止" # 判断方向 if abs(dx) >abs(dy): return"右" if dx>0else"左" else: return"下" if dy>0else"上"def image_to_user_direction(img_dir): """ 将图像坐标系转换为用户视角方向 图像左→用户右,图像右→用户左 """ if img_dir=="左": return"右" elif img_dir=="右": return"左" else: returnimg_dir
4.1.3 实时手势处理流程
def hand_gesture_worker(): """手势识别工作线程""" global current_hand_info, gesture_running #1. 初始化RealSense摄像头 pipeline = rs.pipeline() config = rs.config() config.enable_stream(rs.stream.color,640,480, rs.format.bgr8,15) pipeline.start(config) #2. 主循环:持续处理每一帧 while gesture_running: # 获取彩色帧 frames = pipeline.wait_for_frames(timeout_ms=1000) color_frame = frames.get_color_frame() if not color_frame: continue # 转换为numpy数组 color_image = np.asanyarray(color_frame.get_data()) h, w = color_image.shape[:2] # BGR转RGB(MediaPipe需要RGB) rgb = cv2.cvtColor(color_image, cv2.COLOR_BGR2RGB) #3. MediaPipe处理 results = hands.process(rgb) #4. 解析结果 lines = [] if results.multi_hand_landmarks and results.multi_handedness: for hand_landmarks, handedness inzip( results.multi_hand_landmarks, results.multi_handedness ): # 获取左右手判断 mp_label = handedness.classification[0].label user_hand ="右手"if mp_label =="Left"else"左手" # 尝试识别特殊手势 gesture =recognize_gesture(hand_landmarks.landmark) if gesture: lines.append(f"[{user_hand}]{gesture}") else: # 获取食指方向 direction =get_finger_direction(hand_landmarks.landmark, h, w) # 转换视角 user_direction =image_to_user_direction(direction) lines.append(f"[{user_hand}]{user_direction}") # 更新全局状态 current_hand_info ="\n".join(lines) if lines else"未检测到手" time.sleep(0.1) # 控制帧率 #5. 清理资源 pipeline.stop() hands.close()
4.1.4 手势在视力测试中的作用本系统中,手势识别用于以下场景:
- OK手势启动测试
- 用户做OK手势表示准备开始测试
- 系统检测到OK手势后自动启动
- 方向手势回答
- 测试过程中,用户通过伸手指方向来回答E字方向
- 系统检测食指方向,判断用户回答是否正确
- 左右手切换
- 右眼测试用右手,左眼测试用左手
- 通过multi_handedness判断用户使用的是哪只手
4.2 视频播放技术使用GStreamer实现视频播放,支持硬件解码:
#GStreamer视频解码管道 (intro_video_player.py)pipeline_str = ( "filesrc location={video_path} ! " "qtdemux ! " "h264parse ! mppvideodec ! "# 瑞芯微硬件解码 "videoconvert ! video/x-raw,format=BGR ! " "appsink name=sink emit-signals=true")
技术要点:
- 使用mppvideodec调用RK3576硬件解码器
- 通过AppSink将视频帧传递给Qt UI显示
- 音频使用独立管道通过ALSA播放
4.3 状态机设计系统使用有限状态机管理测试流程:
classTestState: # 系统状态 SYSTEM_STATE_IDLE = 0 # 系统空闲 SYSTEM_STATE_TESTING = 1 # 正在测试 # 应用状态 APP_STATE_WAITING_OK = 0 # 等待OK手势 APP_STATE_WAITING_HAND_OK= 1 # 等待举手 APP_STATE_TESTING = 2 # 正在测试 APP_STATE_SHOWING_RESULT = 3 # 显示结果
4.4 距离检测通过串口读取红外测距传感器数据:
# 串口读取距离数据 (main.py)def _read_distance(self): try: ifself.serial_port and self.serial_port.in_waiting: data= self.serial_port.readline() ifdata.startswith(b'D:'): distance = int(data[2:].strip()) returndistance except Exceptionase: print(f"读取距离失败:{e}") return-1
05
调试过程与问题解决
5.1 主要问题与解决方案
问题 |
原因分析 |
解决方案 |
视频无法播放 |
mp4v编码不支持 |
使用H.264编码重新转换视频 |
音频无声音 |
采样率不匹配(24kHz mono) |
转换为44.1kHz stereo |
手势识别不稳定 |
光照条件影响 |
调整检测阈值,增加置信度 |
距离传感器读数为0 |
串口波特率不匹配 |
改为115200波特率 |
测试结果不准确 |
左右手方向判断错误 |
修正手势方向与E字方向的映射关系 |
视频画面无法清除 |
停止时回调递归 |
添加stopping标志防止重复调用 |
E字符不显示 |
停止视频后未显示char_label |
在_start_vision_test中添加显示逻辑 |
06
项目亮点总结
6.1 技术创新
- 端侧AI推理: 利用RK3576的NPU实现实时手势识别,无需云端支持
- 多模态交互: 结合视频、语音、手势等多种交互方式
- 硬件加速: 使用GStreamer硬件解码播放视频,效率高
6.2 工程亮点
- 模块化设计: 清晰的分层架构,易于维护和扩展
- 状态机管理: 完善的测试流程状态控制
- 容错处理: 丰富的异常处理和恢复机制
- 用户友好: 语音引导+视频演示,操作简单
6.3 应用价值
- 可部署于社区健康站、学校、商场等场所
- 无需专业人员辅助,用户可自主完成检测
- 检测结果实时语音播报,方便快捷
- 成本可控,易于推广普及
07
技术参数
参数 |
数值 |
代码总量 |
3092行 |
视频解码分辨率 |
640x480 |
手势识别帧率 |
30fps |
距离检测精度 |
±10mm |
语音采样率 |
44.1kHz |
测试时间 |
约2-3分钟/次 |
08
文件结构
RK3576-Pro/├── main.py # 主程序入口 (942行)├── ui_vision_test.py # UI界面 (241行)├── intro_video_player.py # 视频播放器 (618行)├── hand_gesture_task.py # 手势识别 (187行)├── generate_custom_audio.py # 音频生成脚本 (95行)├── pic/ # E字视力表图片│ ├── up.png│ ├── down.png│ ├── left.png│ └── right.png├── custom_audio/ # 语音文件│ ├── welcome.wav│ ├── switch_right_hand.wav│ ├── result_*.wav│ └── ...└── videos/ # 视频文件 └── intro_guide.mp4
09
运行说明
9.1 依赖安装
# 安装Python依赖pip install pyside6 mediapipe pygame numpy opencv-python# 安装系统依赖apt-get install gstreamer1.0-tools gstreamer1.0-plugins-base \gstreamer1.0-plugins-good alsa-utils
9.2 运行步骤
- 连接硬件设备(摄像头、传感器、音频设备)
- 启动开发板
- 运行主程序:
python3main.py
- 按照屏幕提示和语音指引进行测试
10
总结与展望本项目成功实现了一套基于RK3576的AI视力检测系统,通过MediaPipe实现精准的手势识别,结合PySide6实现友好的用户界面,利用GStreamer实现流畅的视频播放。系统运行稳定、操作简便,具有良好的用户体验。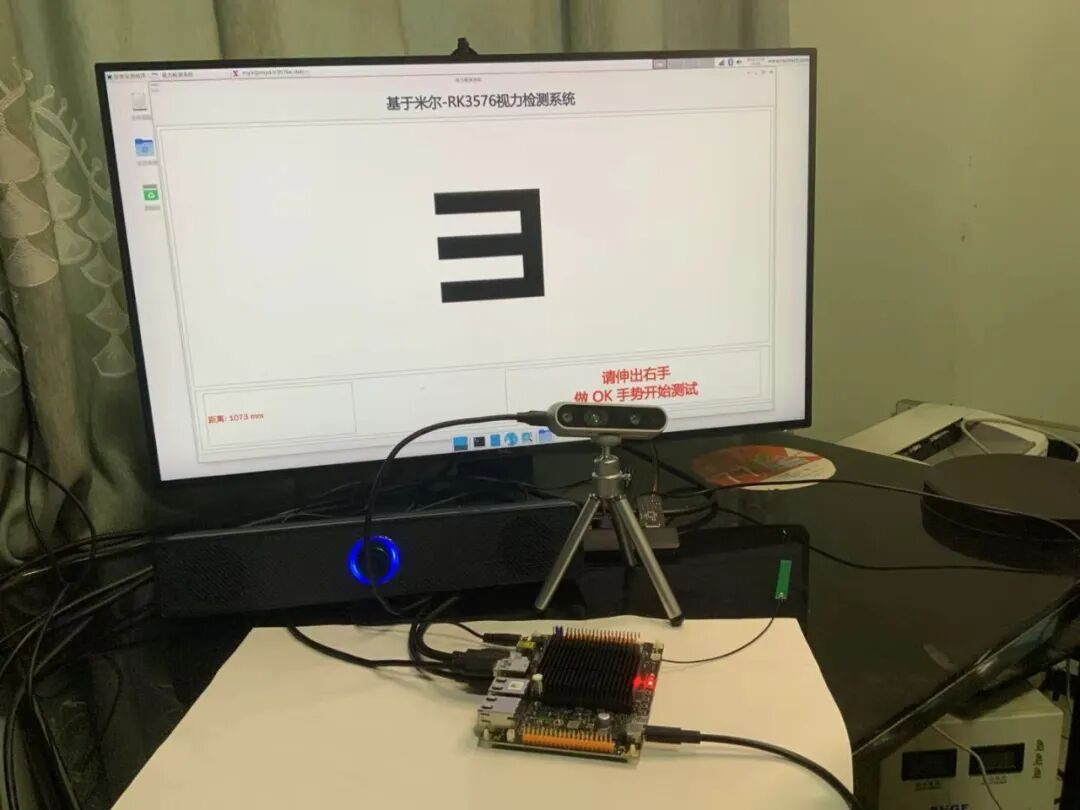
效果展示:米尔RK3576开发的无人视力测试仪效果视频:未来可进一步优化:
- 增加更多视力测试模式
- 支持云端数据存储和分析
- 添加更多健康检测功能
- 优化AI模型提升识别准确率
相关文章
-

2.3cm间距里的定位魔法:4天线如何实现360°智能跟随定位
-

简仪科技十周年庆暨2026 JY CONNECT圆满举行
-
电缆故障监测采用的技术内容重点涉及哪些方面?
-

普乐特空压机远程启停控制方案:用物联网技术让空压机管理”智”
-

分布式光伏监控系统解决方案:从并网合规到智能运维的技术闭环
-

创新突破|光纤可插拔式1470nm光源:重塑精准激光除草新范式
-
抽油烟机LED灯气密性检测设备,操作简单上手快
-

锚定100TB目标!西部数据公布2032年技术规划,Agent AI推动存储革新


