无刷减速电机MCU控制方式与间隙要求

无刷减速电机作为一种高效、低噪音、长寿命的驱动装置,广泛应用于工业自动化、机器人、医疗设备等领域。其核心控制依赖于微控制器单元(MCU),而机械传动中的间隙问题直接影响系统精度和稳定性。本文将深入探讨无刷减速电机的MCU控制方式及其间隙要求,为工程师提供技术参考。

一、无刷减速电机的MCU控制方式
1. 基本控制原理
无刷电机通过电子换向替代传统有刷电机的机械换向,MCU需要实时检测转子位置(通常通过霍尔传感器或反电动势法),并控制三相逆变桥的开关顺序。减速机构则通过齿轮组降低转速、提高扭矩,两者的协同控制是系统设计关键。
2. 主流控制算法
(1)方波控制(六步换向)
●实现简单,MCU资源占用少。
●依赖霍尔传感器,存在转矩脉动。
●典型应用:电动工具、家用电器。
(2)正弦波控制(FOC矢量控制)
●采用Clarke/Park变换实现磁场定向。
●需要高精度PWM和电流采样。
●优势:运行平稳,效率提升5-15%。
●案例:某工业机器人关节电机采用STM32G4系列MCU实现50kHz FOC闭环。
(3)直接转矩控制(DTC)
●省去坐标变换环节,动态响应快。
●需要高速ADC(1Msps以上)。
●适用于伺服驱动等高性能场景。
3. 关键MCU选型参数
●主频:≥72MHz(FOC控制需求)。
●PWM分辨率:≥12bit(如STM32的HRTIM)。
●ADC采样率:≥3Msps(多通道交错采样)。
●硬件乘法器:加速Park逆变换计算。
●死区时间可调:典型50-200ns。
二、减速机构间隙的影响与控制
1. 间隙产生原因
(1)齿轮啮合侧隙
●渐开线齿轮固有特性。
●制造公差(ISO 1328标准)。
●长期磨损(每1000小时约增加2-5μm)。
(2)轴承游隙
●C3组游隙常见于减速电机。
●温升导致的膨胀差异。
(3)联轴器间隙
●弹性联轴器补偿偏差但引入滞后。
2. 间隙量化指标
●弧分表示法:1弧分≈0.0167°。
●线性回差:输出端固定时输入端可转动量。
●某品牌行星减速器样本数据:
精密级:≤3弧分(谐波减速器可达≤1弧分)。
标准级:5-8弧分。
3. 间隙补偿技术
(1)机械预紧方案
●双齿轮弹簧预紧结构。
●交叉滚子轴承应用。
●案例:某医疗CT设备采用预紧式行星减速箱,间隙控制在1.5弧分内。
(2)电子补偿算法
●双编码器反馈(电机端+负载端)。
●非线性PID控制(带死区补偿)。
●前馈补偿模型:
```math
τ_comp = J·(θ_desired - θ_actual)/Δt + K_d·(ω_desired - ω_actual)
```
其中J为转动惯量,K_d为阻尼系数。
(3)智能控制策略
●基于LuGre模型的摩擦补偿。
●神经网络预测控制(需DSP支持)。
●某半导体设备实测数据:
| 控制方式 | 定位误差(μm) | 稳定时间(ms) |
| 常规PID | ±15 | 120 |
| 间隙补偿PID | ±8 | 80 |
| 自适应模糊控制 | ±5 | 50 |
三、系统集成注意事项
1. 机电参数匹配
●电机扭矩常数与减速比关系:
```math
T_out = T_motor × i × η
```
其中i为减速比,η为效率(通常85-95%)。
2. 热管理要求
MCU结温控制在85℃以下(工业级)。
减速箱油温不超过90℃。
建议布局:
●电机与减速箱直接法兰连接。
●MCU控制板距离电机本体≥50mm。
●热敏感元件避开齿轮箱散热面。
3. 电磁兼容设计
电机电缆双绞线处理(节距≤50mm)。
PWM频率选择建议:
●8-16kHz(避免可听噪声)。
●20kHz以上(降低铁损)。
共模扼流圈选用:阻抗≥100Ω@1MHz。
四、典型应用案例分析
1. 协作机器人关节模组
采用集成式设计(电机+谐波减速+编码器)。
控制方案:
●主控:TI C2000 Delfino系列。
●通信:EtherCAT(同步周期≤1ms)。
●间隙补偿:自适应卡尔曼滤波。
性能指标:
●重复定位精度±0.02mm。
●反向间隙≤0.01°。
2. 自动导引车(AGV)驱动轮
轮毂电机+行星减速结构。
特殊处理:
●防水型磁性编码器(IP67)。
●防反冲蜗杆传动设计。
●CANopen通信协议。
3. 精密光学平台调节机构
微型减速电机(直径28mm)。
关键技术:
●压电陶瓷微步补偿。
●纳米级光学编码器反馈。
●空气轴承支撑。
五、未来发展趋势
1. 集成化控制方案
单芯片SOC集成MCU+栅极驱动+电源管理。
2. 智能诊断技术
基于振动分析的齿轮磨损预测。
电流纹波检测轴承故障。
3. 新材料应用
陶瓷齿轮(零润滑需求)。
碳纤维复合材料壳体(减重30%)。
4. 通信协议升级
TSN时间敏感网络。
单对以太网(SPE)。
结语:
无刷减速电机系统的性能优化需要机电协同设计。在MCU控制方面,建议优先选择支持硬件加速FOC的32位处理器;对于间隙控制,精密应用应考虑谐波减速或采用双编码器闭环。随着工业4.0发展,网络化、智能化的无刷减速系统将成为主流,这对控制算法的实时性和机械精度提出了更高要求。工程师在具体设计时,需根据动态响应、定位精度、成本预算等要素进行多维权衡。
相关文章
-
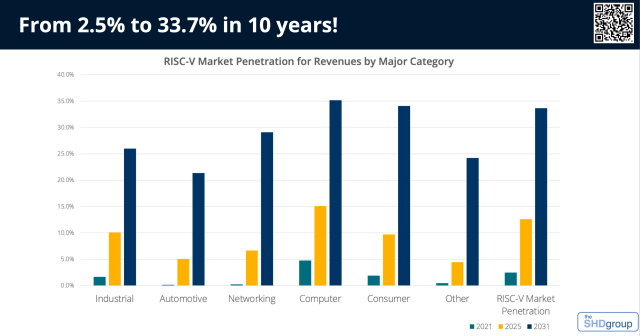
RISC-V进军三大核心赛道:数据中心、边缘AI、太空
-
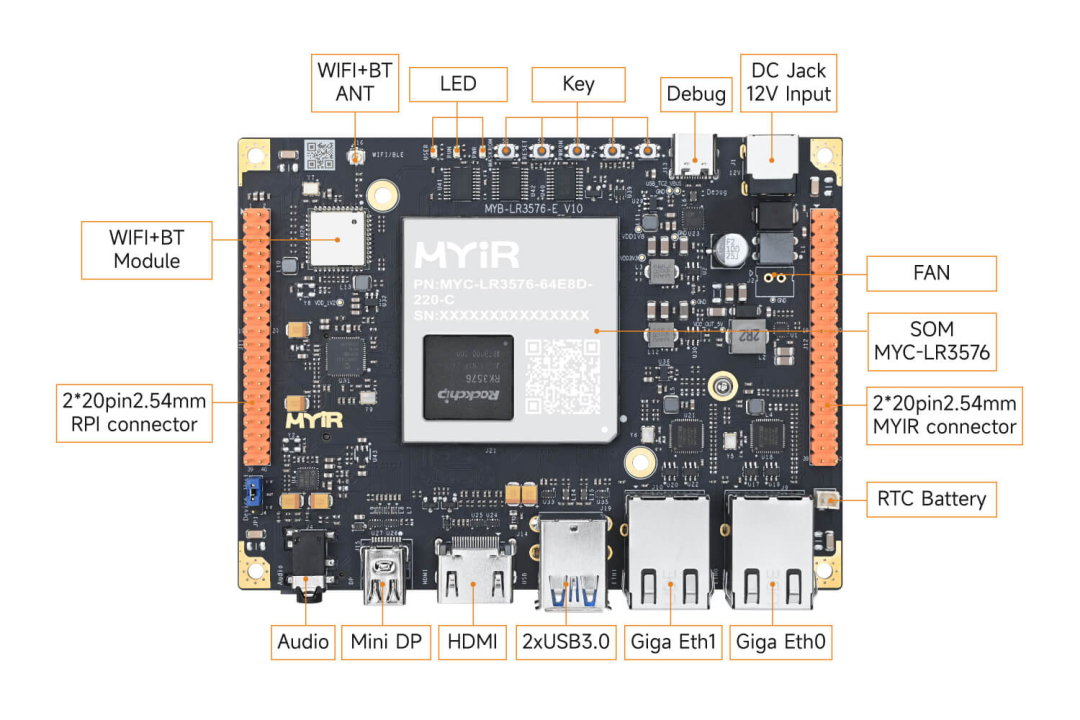
AI落地好场景,用米尔RK3576做无人视力测试仪
-

2.3cm间距里的定位魔法:4天线如何实现360°智能跟随定位
-

简仪科技十周年庆暨2026 JY CONNECT圆满举行
-
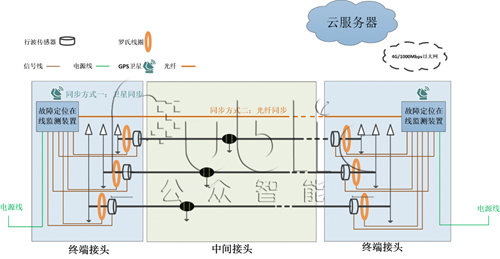
电缆故障监测采用的技术内容重点涉及哪些方面?
-

普乐特空压机远程启停控制方案:用物联网技术让空压机管理”智”
-

分布式光伏监控系统解决方案:从并网合规到智能运维的技术闭环
-

创新突破|光纤可插拔式1470nm光源:重塑精准激光除草新范式


